VersatileAIRMOB -
DEVELOPMENT OF A QUADCP-VTOL UAV FOR CARGO TRANSPORT AND AERIAL MANIPULATION MISSIONS FOR ADVANCED AIR MOBILITY
Hybrid UAVs in the tiltrotor configuration combine the advantages of fixed-wing aircraft (rapid deployment and greater range) with the capabilities of rotary-wing aircraft (vertical takeoff and landing (VTOL) and hovering), thus creating effective solutions for advanced air mobility systems. These UAVs can access remote areas, making them ideal for delivering essential supplies to hard-to-reach locations.
Despite these advantages, the development of hybrid UAVs poses several challenges. Since the configuration is new, aeronautical studies in the literature are scarce. Designing control strategies for the hybrid UAV is also challenging because the system is mechanically underactuated, highly nonlinear, and coupled. Additionally, few studies address the control of convertible UAVs (CP) during the transition between their different flight modes.
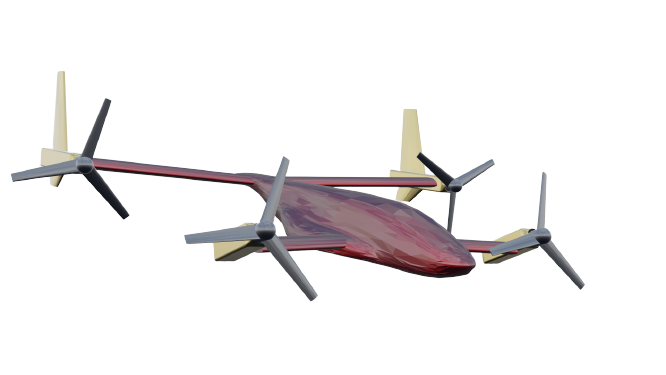
In this context, this project aims to develop an innovative hybrid UAV, called the QuadCP-VTOL UAV, equipped with renewable energy sources, four convertible rotors, cargo transport, and aerial manipulation capabilities, and able to navigate safely and reliably in advanced air mobility systems.
Situation: (2023 – Progress)
Strategies for Motion Planning, Coordination, and Control of Autonomous Vehicles for Safe and Efficient Navigation (
Demanda Universal - FAPEMIG )
In the coming years, the use of autonomous robots for various tasks will be of great importance. Through this utilization, it will be possible to achieve better performance, increased safety, and reduced costs in a variety of processes, particularly in key sectors of the economy in Minas Gerais, such as mining and agriculture. For the practical implementation of robotic technology, it is essential that the movement of these robots occurs safely and efficiently. This project focuses on the study of new methods to ensure that this movement occurs as desired in different scenarios. New techniques for motion planning, coordination, and control of robotic platforms will be investigated.
Situation: (2024 – Progress)
Low-Cost Mapping and Navigation System for Safe Operation of Robotic Service Devices in Production Plants
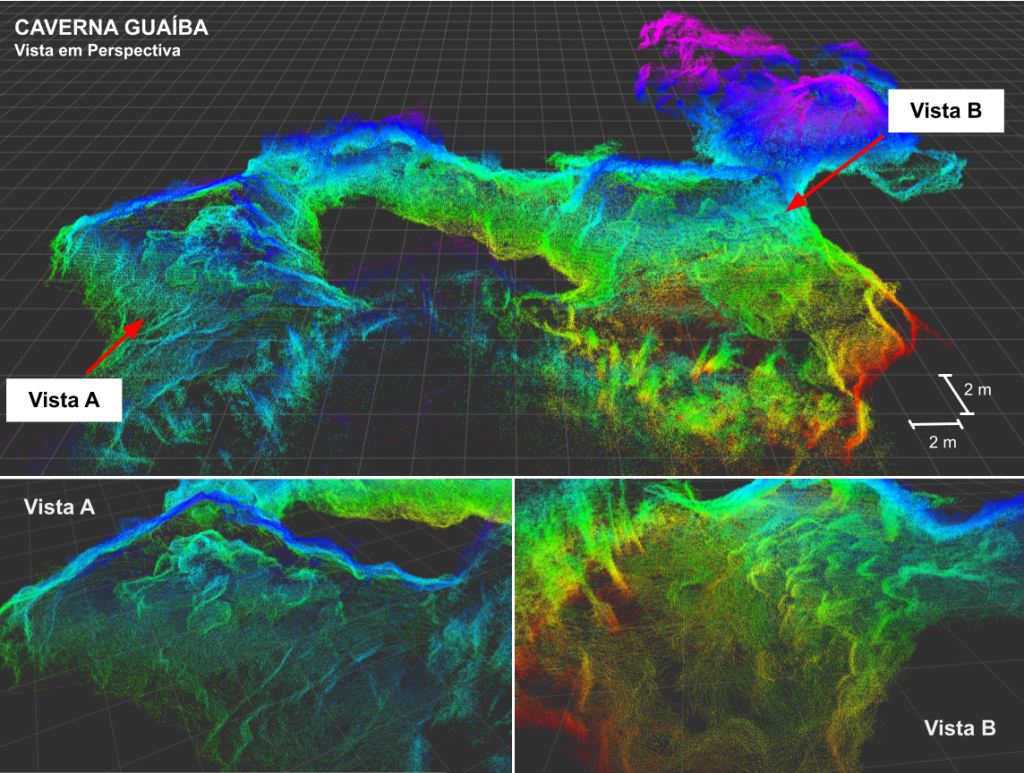
This project proposes the development of new algorithms optimized for their efficient implementation and deployment in digital systems such as MPSoC, employing techniques including LeGO LOAM based on LiDAR, RTAB-Map, Dijkstra, and RRT*, vector field and predictive controls. The algorithms will be tested on simulators and aerial and ground robotic platforms available at UFMG. Additionally, an embedded system will be developed for validating the algorithms in field operations, mapping environments through point clouds, and controlling intelligent devices and vehicles from Vale in mining areas.
Situation: (2022 – Progress)
Robust Control Strategies Subject to Constraints for Convertible UAVs
In recent years, unmanned aerial vehicle (UAV) technology has been particularly useful in search and rescue missions, thanks to its capabilities for rapid response, remote operation, transportation, monitoring, and sensor deployment. The possibilities for search and rescue services become limited due to the limitations of the chosen type of UAV: fixed-wing aircraft have greater range, autonomy, and payload capacity, but lack vertical take-off and landing capability; whereas rotary-wing aircraft have VTOL capability but have shorter range and autonomy. Therefore, the limitations of available space in emergencies and the uncertainty of which type of aircraft to choose in the early stages of such a situation justify the need to explore new tools that can provide a solution to the problem.
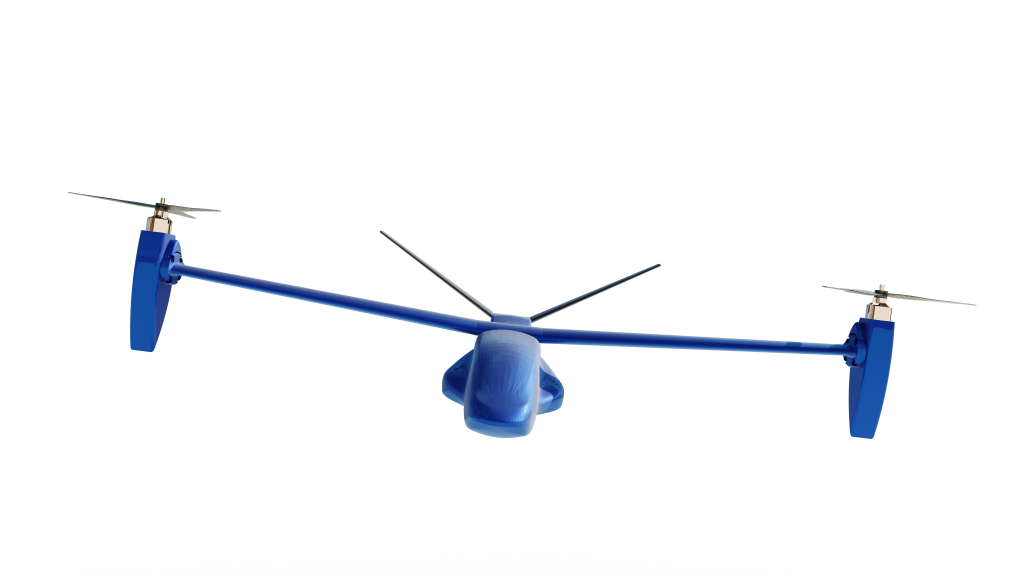
This project proposes to explore the use of convertible fixed-wing aircraft with VTOL capability, combining the advantages of fixed-wing and rotary-wing aircraft. To develop control systems for these types of UAVs, robust model predictive control (MPC) strategies will be developed. Within this approach, there are open problems that will be addressed in this project: i) formulation of robust MPC based on tubes for time-varying systems aiming to solve trajectory tracking problems; ii) inclusion of economic terms in the MPC optimization problem, particularly considering economic costs related to UAV battery consumption and trajectory planning and obstacle avoidance. With this latter economic cost, the aim is to solve route planning and control signal calculation using a single optimization problem. On the other hand, failures that may occur in actuators and sensors will also be considered. Finally, the strategies will be implemented in a 3D simulation based on the UAV’s CAD with hardware-in-the-loop (HIL).